Our overarching goal is to explore and understand the complexity of urban mobility systems on the spatio-temporal scale. To do so, we use and develop novel geospatial analytics tools to unravel the relevant socio-economic phenomenons of freedom.
Questions of interest include: (i), How does the citizen move inside the city and how is this related to the complex configuration of urban built environment? (ii), What is the recurrent mobility pattern seen in correlated urban systems? Is this a spatio-temporal sensitive state? What is the mechanism of dissipation in that state? (iii), Why is the transition pattern in urban mobility systems so predictable?
We explore and model how people move collectively in urban space to act more intelligently than any individual person or group could do.
We apply methods at the intersection of complexity science and big data analytics to reveal hidden regularities in the organisation of cities.
We acquise, integrate, and analyze big and heterogeneous data generated by a diversity of sensors to tackle the major issues that cities face.

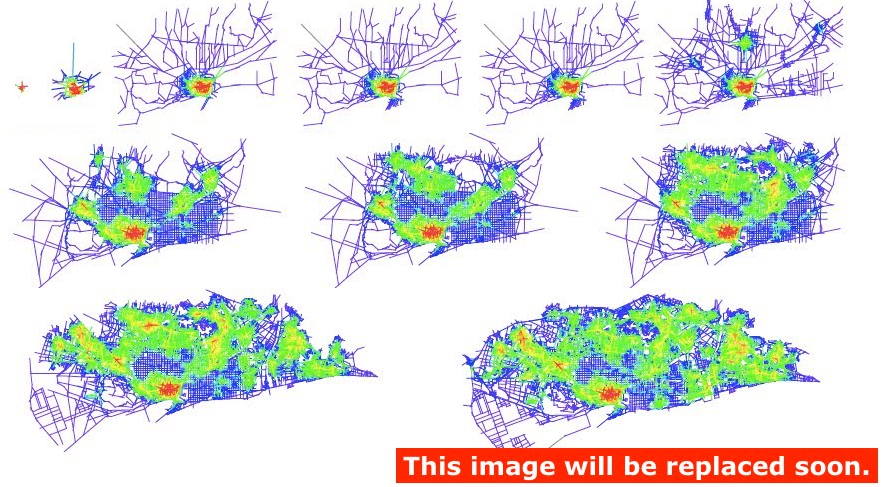
A framework for mixed-use decomposition based on temporal activity signatures extracted from big geo-data
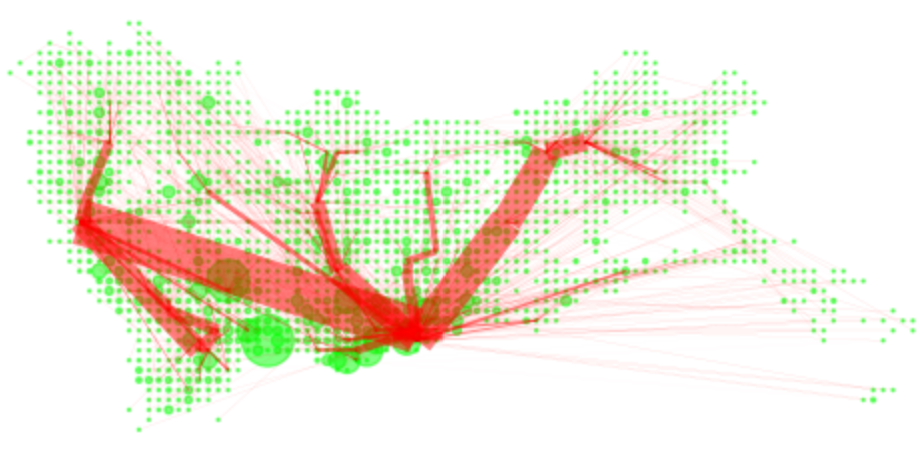
Incorporating spatial interaction patterns in classifying and understanding urban land use
An ensemble learning approach for urban land use mapping based on remote sensing imagery and social sensing data
We serve as a research hub and build analytical platforms for collaborative action and innovation to address complex societal problems.